2026е№ҙ2жңҲ20ж—ҘгҒ«й–ӢеӮ¬гҒ•гӮҢгҒҹUDXгғҜгғјгӮҜгӮ·гғ§гғғгғ—2026гҒ§гҒ®гғ—гғ¬гӮјгғігғҶгғјгӮ·гғ§гғігӮ’еҜҫиұЎгҒ«еҜ©жҹ»гӮ’иЎҢгҒ„пјҢд»ҘдёӢгҒ®йҖҡгӮҠUDXиіһпјҢUDXеҘЁеҠұиіһгӮ’жұәе®ҡгҒ—гҒҫгҒ—гҒҹпјҺиЎЁеҪ°зҠ¶гҒҜеҫҢж—ҘйғөйҖҒгҒ„гҒҹгҒ—гҒҫгҒҷпјҺ
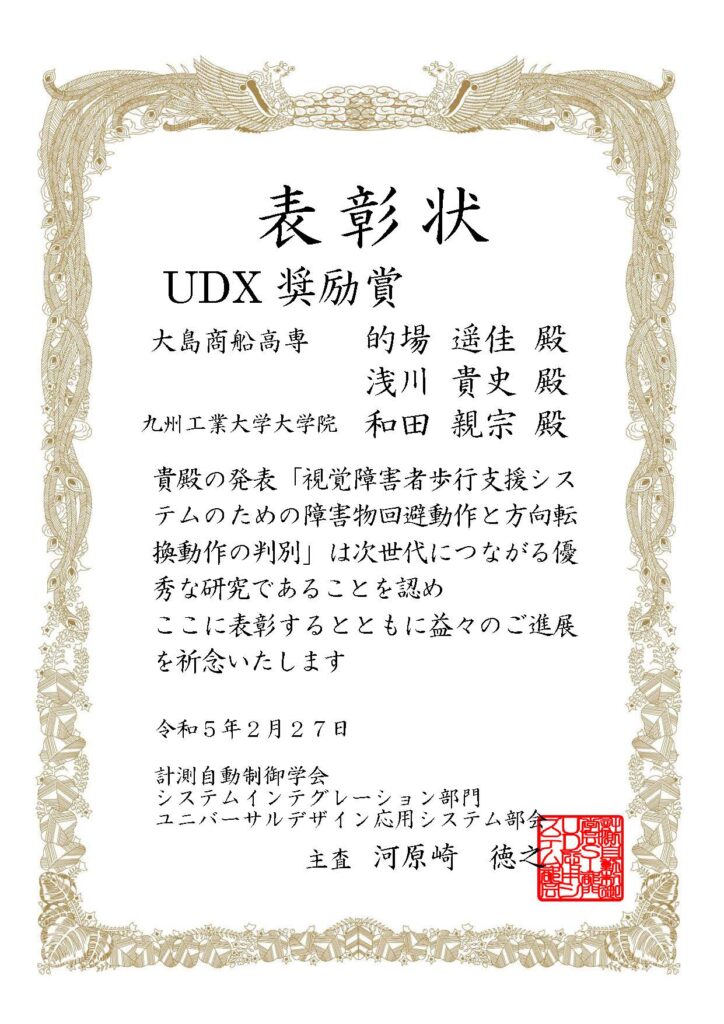
UDXиіһгҖҖ2件
дҪҗдјҜ иӢұж—Ҙи·ҜпјҢеҝ—е ӮеҜә е’ҢеүҮпјҲд№қе·һеӨ§еӯҰеӨ§еӯҰйҷўпјү
гҖҢиҮӘеӢ•йҒӢи»ўи»ҠгҒӢгӮүгғүгғ©гӮӨгғҗгҒ«еҗ‘гҒ‘гҒҹиӯІгӮҠж„ҸеӣіжҸҗзӨәгҖҚ SI2005
еҚҠз”° ж…§пјҢйҮҺжқ‘ еҪ©д№ғпјҢж —жһ— и©©жӯ©жңӘпјҲжқұдә¬з§‘еӯҰеӨ§еӯҰпјүпјҢеҢ—жқ‘ е…үеҸёпјҲз”ЈжҘӯжҠҖиЎ“з·ҸеҗҲз ”з©¶жүҖпјүпјҢжІіеҗҲ жҒ’пјҲжқұдә¬йғҪеҒҘеә·й•·еҜҝеҢ»зҷӮгӮ»гғігӮҝгғјз ”究жүҖпјүпјҢиҘҝз”° дҪіеҸІпјҲжқұдә¬з§‘еӯҰеӨ§еӯҰпјү
гҖҢгғ•гғ¬гӮӨгғ«й«ҳйҪўиҖ…ж”ҜжҸҙгӮ’зӣ®зҡ„гҒЁгҒ—гҒҹз”ҹжҙ»з’°еўғгҒ«гҒҠгҒ‘гӮӢе°ҸгҒ•гҒӘеҪўзҠ¶еӨүеҢ–гҒҢиә«дҪ“дҝқжҢҒжҖ§гҒ«дёҺгҒҲгӮӢеҠ№жһңгҒ®и§ЈжһҗгҖҚ ROBOMECH2025
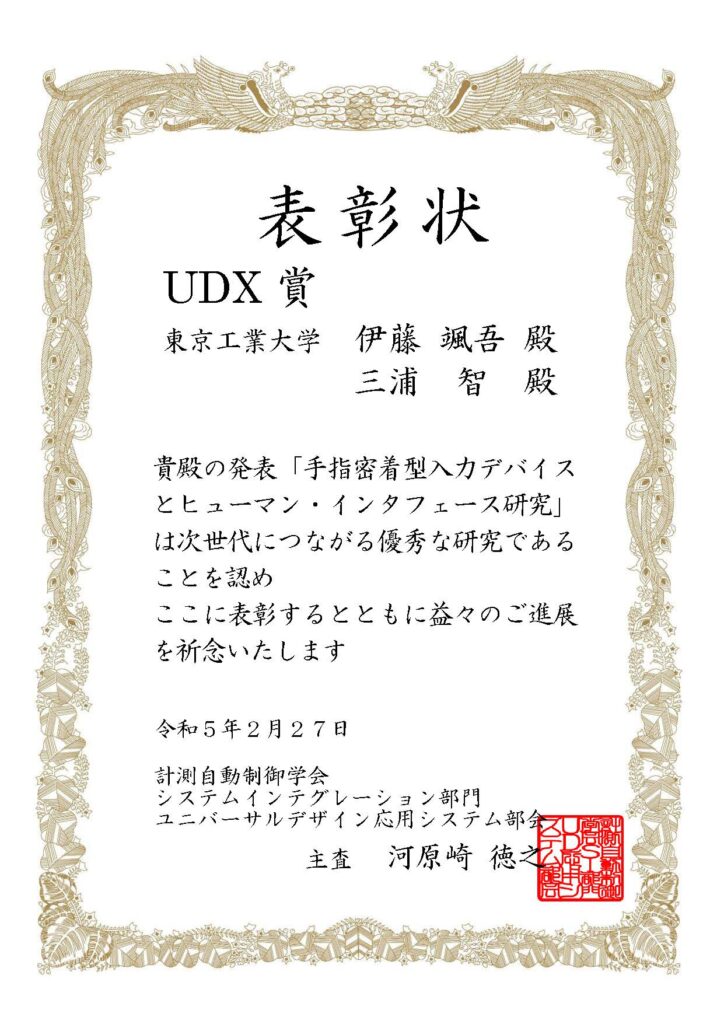
UDXеҘЁеҠұиіһгҖҖ1件
е°Ҹе¶Ӣ зҙ”еҘҲпјҢд№…дҝқ еӨ§ең°пјҢжқҫж°ё еӨҸе·ұпјҲд№қе·һеӨ§еӯҰпјүпјҢе°Ҹжһ— жҙӢпјҲеӨ§йҳӘеӨ§еӯҰпјүпјҢйҮ‘з”° зӨјдәәпјҢеұұжң¬ е…ғеҸёпјҢдёӯеі¶ еә·иІҙпјҲд№қе·һеӨ§еӯҰпјү
гҖҢи»ҠжӨ…еӯҗж“ҚдҪңгҒ«гҒҠгҒ‘гӮӢиЎЁйқўгҒ«зӘҒиө·гӮ’ж–ҪгҒ—гҒҹгғҸгғігғүгғ«гӮ’з”ЁгҒ„гҒҹжҠҠжҢҒең§еҠӣеҲҶеёғгҒ«гӮҲгӮӢдёҠиӮўе§ҝеӢўжҺЁе®ҡгҖҚ ROBOMECH2025
еҜ©жҹ»е§”е“ЎпјҲдә”еҚҒйҹій Ҷпјү
жө…е·қ иІҙеҸІпјҲеӨ§еі¶е•ҶиҲ№й«ҳзӯүе°Ӯй–ҖеӯҰж ЎпјүпјҢжІіеҺҹеҙҺ еҫід№ӢпјҲзҘһеҘҲе·қе·Ҙ科еӨ§еӯҰпјүпјҢжқ‘дёҠ ејҳиЁҳпјҲIHIпјүпјҢеҗүз•ҷ еҝ еҸІпјҲзҘһеҘҲе·қе·Ҙ科еӨ§еӯҰпјү